PID types
Introduction
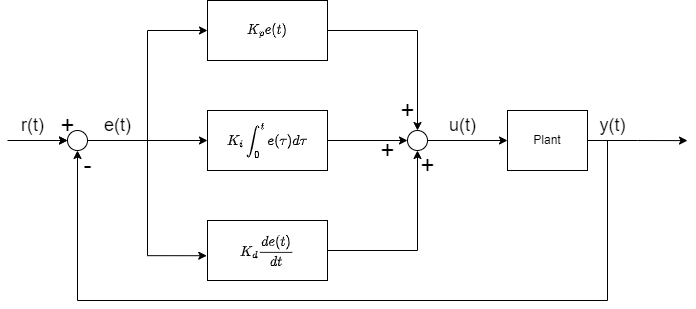
PID control is a feedback control mechanism that is widely used in industrial processes and control systems. It stands for Proportional-Integral-Derivative, which refers to the three terms that make up the controller’s algorithm. A systematic block diagram of the standard PID controller (type A) is shown below.
A distinction can be made in the error terms of the different types of PID controllers. This has lead to three different versions of the PID controller: Type A, B and C.
Type A (PID)
This is the standard PID-controller. The control output consists of a proportional, integral and derivative action. The control output is described as:
\$u(t) = K_p e(t) + K_i \int_{0}^{t} e(\tau) d\tau + K_d \frac{de(t)}{dt} \$.
The downside is that when a setpoint changes, this directly affects the proportional and derivative terms. Therefore sudden changes in the setpoint can lead to unwanted effects in the P- as well as the D-action. This results in sudden changes in the control output as well, which is known as derivative- and proportional-kick (or setpoint-kick in general). For this reason, the Type B and C controllers are introduced.
Type B (PI-D)
The type B controller is similar to type A.
\$u(t) = K_p e(t) + K_i \int_{0}^{t} e(\tau) d\tau + K_d \frac{d(-y(t))}{dt} \$
The difference is that the setpoint is removed from the D-term. Opposed to the ‘Type A’ controller, no spikes will occur in the control output at setpoint changes resulting from the D-term. The unwanted effect of sudden changes in the setpoint is removed from the D-action, but not yet from the P-action.
Type C (I-PD)
Similar to Type B, but now the setpoint is also removed from the P-action. For this controller sudden changes in the setpoint do not lead to sudden changes in the control output.
\$u(t) = K_p (-y(t)) + K_i \int_{0}^{t} e(\tau) d\tau + K_d \frac{d(-y(t))}{dt} \$
Implementation in PsxCad
In PsxCad, the PID controller can be found in the PSS library.
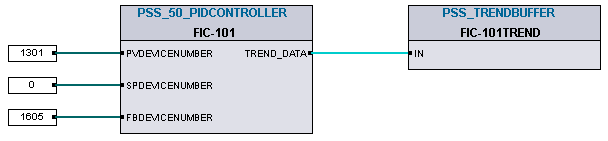
In this controller type A and C are implemented. In the logic script it can be seen that for the type C controller the process value replaces the error (EPSILON) in the proportional and derivative action.


The type of controller can be selected by opening the pop-up of the graphical controller symbol. Here the user can choose between a type A or Type C controller. Type B is not an option. Note that at Powerspex normally only type A controllers are used.
Figure 5. Graphic symbol of PID controller
|
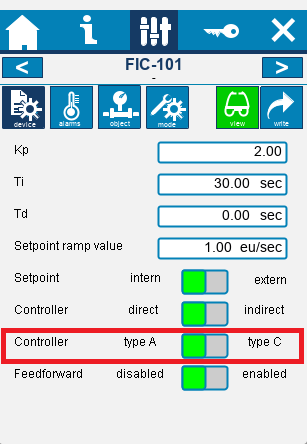
Figure 6. Pop-up
|